Convergence of machine learning and robotics communication in collaborative assembly: mobility, connectivity and future perpectives.

Date
2019-10-16Metadata
Show full item recordAbstract
Collaborative assemblies of robots are promising the next generation of robot applications by ensuring that safe and reliable robots work collectively toward a common goal. To maintain this collaboration
and harmony, elective wireless communication tech-
nologies are required in order to enable the robots share
data and control signals amongst themselves. With the
advent of artificial intelligence (AI), recent advancements in intelligent techniques for the domain of robot
communications have led to improved functionality in
robot assemblies, ability to take informed and coor-
dinated decisions, and an overall improvement in efficiency of the entire swarm. This survey is targeted
towards a comprehensive study of the convergence of
AI and communication for collaborative assemblies of
robots operating in the space, on the ground and in
underwater environments. We identify the pertinent issues that arise in the case of robot swarms like preventing collisions, keeping connectivity between robots,
maintaining the communication quality, and ensuring
collaboration between robots. Machine Learning (ML)
techniques that have been applied for improving dif-
ferent criteria such as mobility, connectivity, quality of
service (QoS) and efficient data collection for energy efficiency are then discussed from the viewpoint of their
importance in the case of collaborative robot assemblies. Lastly, the paper also identifes open issues and
avenues for future research.
Collections
The following license files are associated with this item:

Except where otherwise noted, this item's license is described as Attribution-NonCommercial-NoDerivs 3.0 Ireland
Related items
Showing items related by title, author, creator and subject.
-
3D printed end of arm tooling (EOAT) for robotic automation.
(MDPI, 2018-09)This research furthers the practice of designing and manufacturing End of Arm Tooling (EOAT) by utilizing a low cost additive manufacturing Fused Filament Fabrication (FFF) technique to enable tool weight saving and ... -
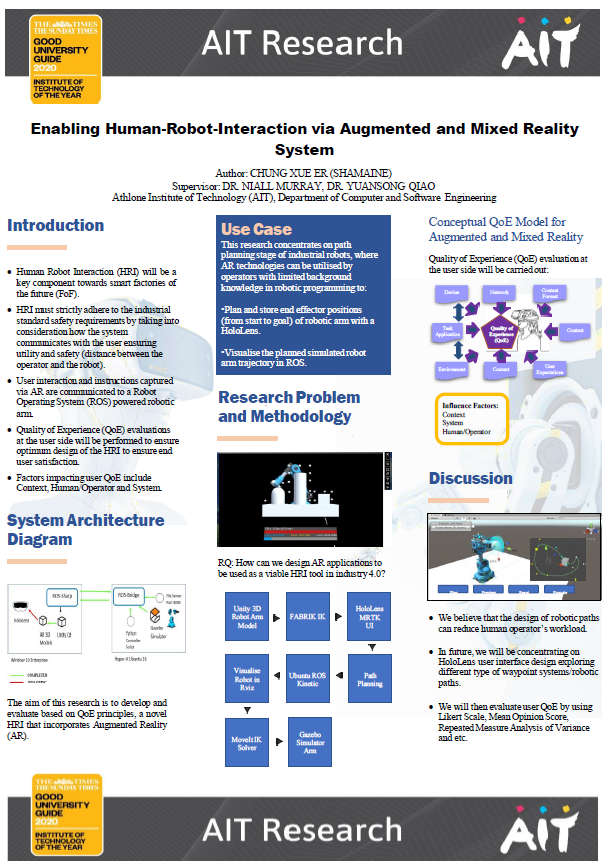
Enabling human-robot-interaction via augment and mixed reality system.
(Athlone Institute of Technology, 2020-06)This research concentrates on path planning stage of industrial robots, where AR technologies can be utilised by operators with limited background knowledge in robotic programming to: Plan and store end effector ... -
An investigation of the use of vision systems for the robotic control of automated vehicles
(Institute of Technology, Sligo, 2007)Humans’ usage of the motor vehicle for transport and freight is ever increasing. It seems that the risks and level of accident rates associated with these traffic systems can only be lessened by increasingly complex systems, ...